












 287 / 457
287 / 457

Материаловедение, динамика и прочность машин и механизмов
287
Некоторые возможности управления одномерным вибрационным полем технологиче-
ской машины.
В ряде случаев для обеспечения качества технологического процесса вибрационное
поле должно иметь однородную и одномерную структуру. Математическая модель взаимодействия
рабочей среды и поверхности рабочего органа формируется из совокупности «подмоделей», исследо-
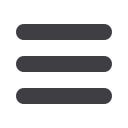
ванных в работах [9 - 14]. «Подмодель» вибрационного стенда [14] представлена на рисунке 1 с по-
мощью твердого тела (1, рис.3) массы
M
, с моментом инерции относительно центра тяжести
J
, уп-
ругих элементов
1
k
,
2
k
, закрепленных в точках
1
A
и
2
A
на расстоянии
1
l
и
2
l
от центра тяжести
O
.
Считается, что центр тяжести и центр качания совпадают у данного твердого тела (1, рис.3). Возбуж-
дение колебаний реализуется путем приложения гармонической силы
)
sin(
0
t
A Q
f
f
l
к точке
0
l
A
на
расстоянии
0
l
от центра тяжести
O
. Для управления структурой вибрационного поля в колебатель-
ный контур механической колебательной системы (рис.3) введено устройство преобразования дви-
жения, установленное вертикально между статической поверхностью (3, рис.3) и центром тяжести
O
твердого тела 1 (рис.3).
Рис. 3. Расчетная схема вибрационной технологической машины
Устройство характеризуется жесткостью
0
k
и массоинерционным коэффициентом
0
L
. В
работе [14] показано, что при определенных условиях на параметры системы и устройства преобра-
зования движения, существует частота внешнего силового возмущения
f
, которая вызывает эффект
динамического гашения угловых колебания. Такой эффект интерпретируется в рамках задачи поиска
рациональной структуры вибрационного поля как режим однородного вибрационного поля колеба-
ния точек твердого тела рабочего органа (1,рис.3), обеспечивающий равенство амплитуд колебания
характерных точек
1
A
,
2
A
. Для рассматриваемой структуры вибростенда (рис.3) частота внешнего
возмущения
0
l
Q
, обеспечивающая однородный режим колебания для малых амплитуд, определяется
выражением:
0
11 22
2 1 0
2
0
1
l
kl kl
k k k
LM
. (1)
Включение в контур вибростенда «настроечного элемента»
L
создает предпосылки к расши-
рению диапазона частот колебания, при которых вибростенд рассматриваемой конструкции обеспе-
чивает однородное вибрационное поле точек рабочей поверхности.
Наравне с представленным подходом к управлению вибрационным полем путем изменения
приведенных массоинерционных характеристик устройства для преобразования движения
L
предла-
гается дополнительный подход, заключающийся в том, что массоинерционные характеристики рабо-
чего органа вибростенда (2, рис.4) изменяются посредством перемещения пригрузов (3, рис.4) вдоль
специальных направляющих (4, рис.4). На рис.4 показана принципиальная схема вибростенда в виде
твердого тела, совершающего вертикальные колебания.
Рабочий орган вибростенда (2, рис.4) установлен на упругие элементы (5, рис.4). По углам ра-
бочей поверхности вибрационной технологической машины установлены датчики (1, рис.4). Вдоль
боковых поверхностей рабочего органа вибрационной машины установлены направляющие (4, рис.4)
с пригрузами (3, рис.4) с возможностью смещения при помощи механизмов поступательного прин-
ципа действия.
Изменение положения пригрузов выступает в качестве фактора, оказывающего воздействие
на вибрационное поле.