












 132 / 457
132 / 457

Механики XXI веку. №15 2016 г.
132
Для большинства гидравлических запорно-стабилизирующих органов технологических сис-
тем выпускаемых промышленностью характерны значительные габариты и сложность конструкции,
что вызвано наличием в их конструкции исполнительного механизма с гидро- или пневмоприводом
[2, 3, 4]. Порог чувствительности таких устройств не превышает 0,025МПа, а зона стабилизации
0,15…0,2МПа. С целью устранения показанных недостатков была разработана конструкция малога-
баритного стабилизатора,которая показана на рисунке 1.Все детали изделия расположены в сборном
корпусе 1. Корпус имеет ступенчатую внутреннюю поверхность с отверстиями, которые используют-
ся для прохода жидкости в выходную магистраль. Основными деталями изделия являются керамиче-
ские затворы: верхний 5 и нижний 6, деталь с калиброванным отверстием 7 , управляющий элемент,
включающий в себя: клапан 8 с фасонной управляющей поверхностью, пружину 9 и поршень 10, а
также уплотнение 3. Затворы представляют собой шлифованные и притертые фасонные керамиче-
ские пластины, одна из которых является подвижной. Подвижная пластина имеет два крайних поло-
жения: «закрыто» и «открыто», которые обеспечиваются фасонной шайбой 2. Решение применения
керамического затвора связано с высокой твердостью и износостойкостью керамики, что важно в
связи возможным наличием в жидкости твердых окислов металла.
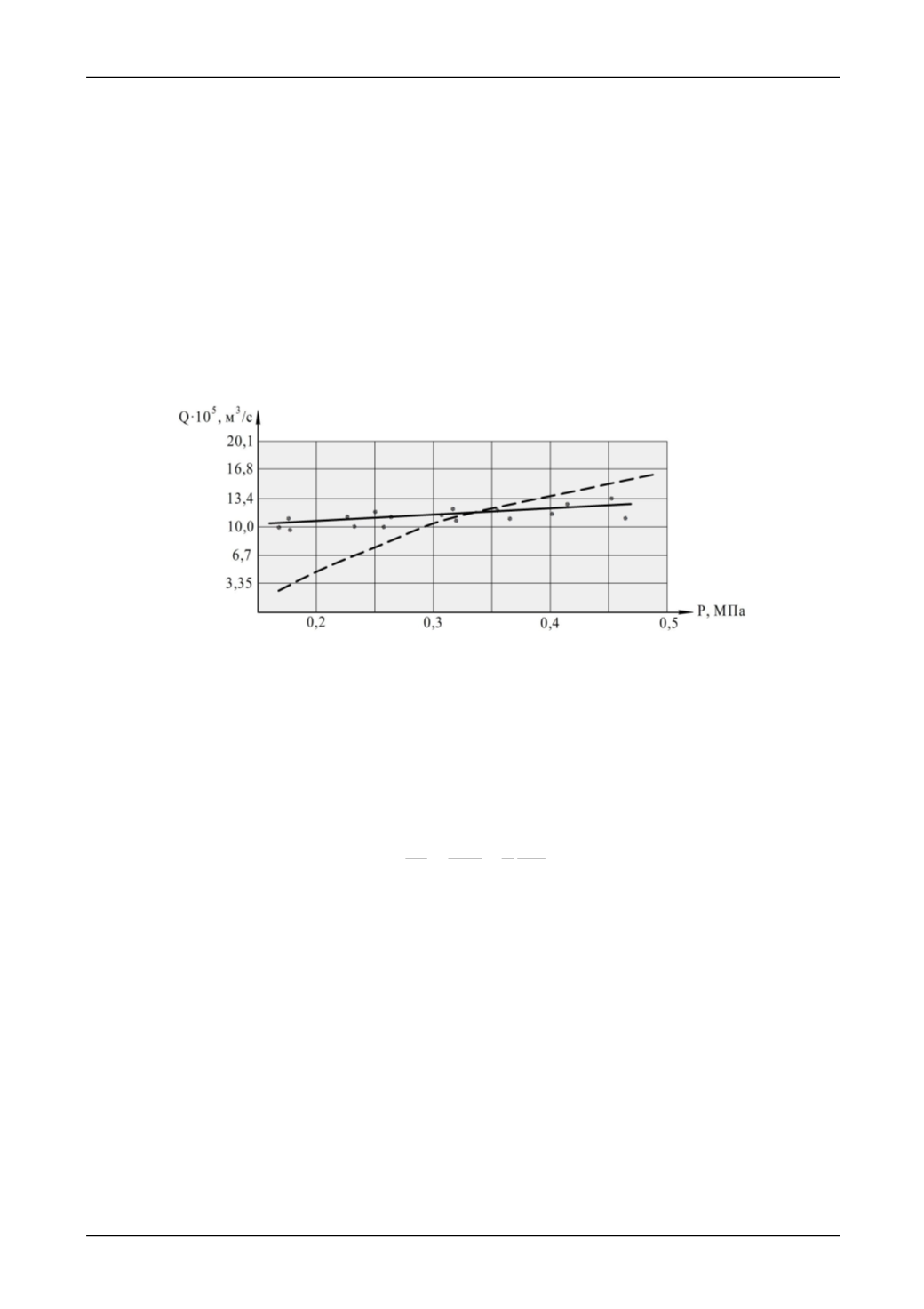
Рис. 2. Расходные характеристики гидросистемы:
« – – » - без стабилизатора расхода;
« –– » - с разработанным стабилизатором расхода.
Функционально стабилизирующий орган представляет собой переменное сопротивление в
гидравлической цепи состоящее из управляющего клапана, поршня и свободнолежащей пружины с
не зажатыми краями, изготовленной из подвергнутой дисперсионному твердению бронзы БрБ2. Из-
менение этого сопротивления, осуществляемое в соответствии с изменением управляющего сигнала,
вызывает целенаправленное изменение расхода регулируемой среды. Течение жидкости через регу-
лирующий орган описывается уравнением [5, 6]:
0
2
1
2
2
2
2
2
1
2
1
F
G d dx
w
w
P
P
где
dp
– перепад давления на поршне толщиной
dx
,Н/м
2
;
– скорость движущейся среды, м/с;
v
–
удельный объем среды, м
3
/кг;
G
– расход жидкости, кг/с;
– коэффициент гидравлического сопро-
тивления;
F
– площадь поперечного сечения выходного клапана, м
2
.
Форма управляющей части клапана 8 обеспечивает течение жидкости над поршнем 10 в тур-
булентном режиме, что создает перепад давлений на противоположных плоскостях поршня. Увели-
чение скорости потока жидкости над клапаном при повышении входного давления, увеличивает раз-
ность давлений
P
действующих на клапан, последний смещается, увеличивая гидравлическое со-
противление и, соответственно, снижая расход жидкости. Понижение входного давления уменьшает
P
и пружина 9 перемещает клапан в обратном направлении, уменьшая гидросопротивление и уве-
личивая расход. На рисунке 2 показаны расходные характеристики разработанного стабилизатора
расхода, полученные по результатам экспериментальных исследований, выполненных на кафедре
Технология машиностроения Севастопольского государственного университета и стабилизатора рас-
хода модели AB-QM.
Погрешность стабилизации расхода жидкости составила 3…4%. Порог чувствительности уст-
ройства составил 0,012 МПа, а зона стабилизации ~ 0,5МПа.