












 231 / 530
231 / 530

Актуальные проблемы в машиностроении. 2016. №3
Технологическое оборудование,
оснастка и инструменты
____________________________________________________________________
231
n
L D
(2)
Принимаем n = 20 оборотов.
мм
D
618 ,79
20 14,3
5000
(3)
Принимаем D =80 мм. Тогда минимальная ширина m шпули:
b dnm
(4)
bмм
m
60 3 20
(5)
где d – диаметр троса, b – толщина укладчика.
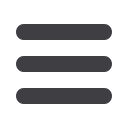
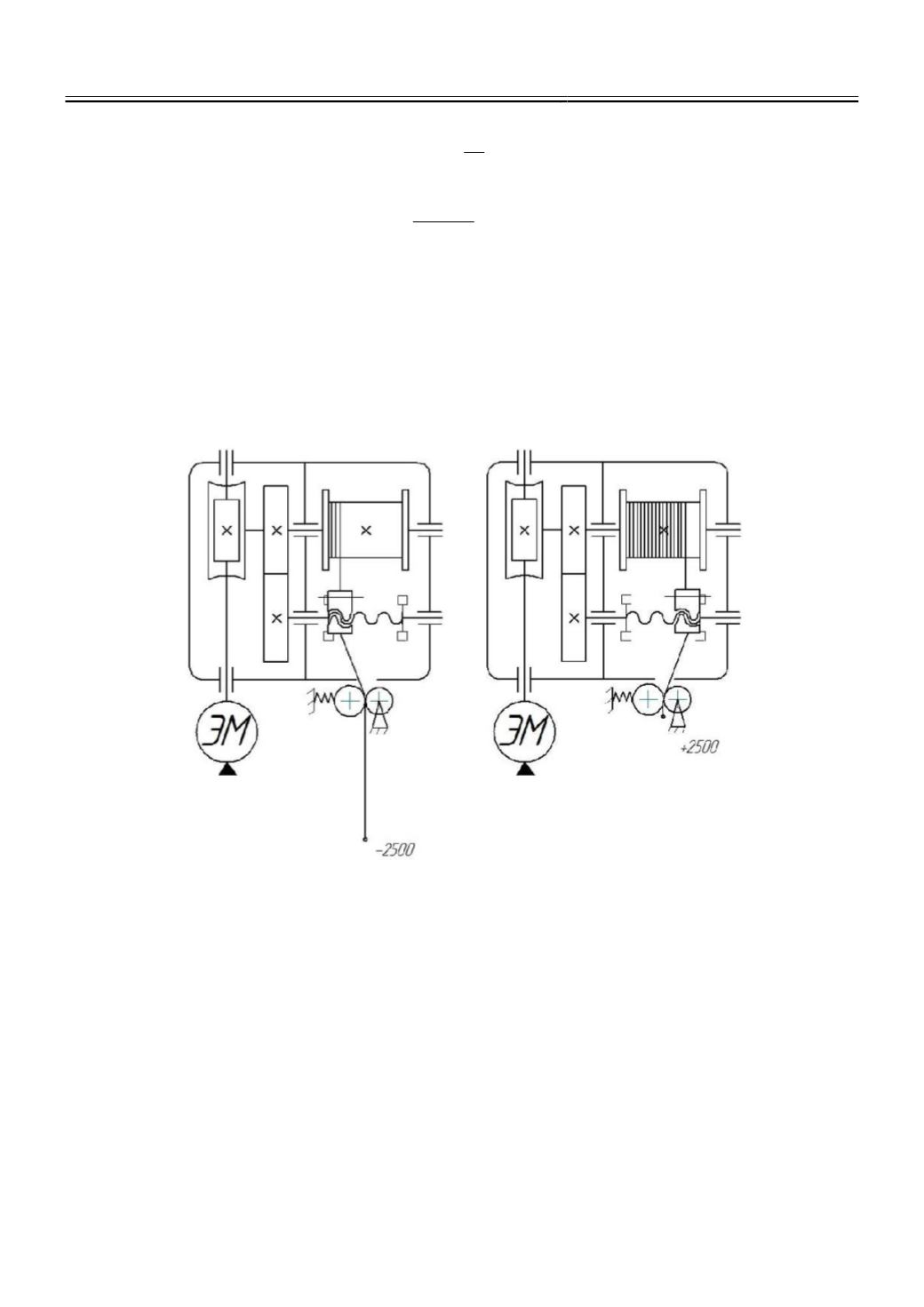
Таким образом, выставляем датчики ограничения вертикального хода на расстоянии
60+b мм, а упоры для гайки-укладчика на расстоянии 63+b мм (во избежание обрыва троса
добавляем по 1,5 мм на сторону, что равно половине оборота шпули). На рисунке 2 пред-
ставлена кинематическая схема привода в крайних положениях.
Рис. 2.
Крайние положения точки вывески
Выводы
Привод вертикального перемещения системы автоматизированной активной показал
высокую степень надёжности в эксплуатации и был разработан таким образом, что верти-
кальный ход точки вывески ограничивается не только оптическими датчиками, но и жестки-
ми упорами, что фактически сводит к минимуму вероятность механической поломки как БС,
так и элементов привода системы. Червячная передача, обладающая свойством самотормо-
жения, позволяет точкам вывески перемещаться только за счет двигателя, что исключает ве-
роятность движения объекта обезвешивания под воздействием сил тяжести или внешней
нагрузки при возникновении аварийной ситуации (отключении электричества).