












 236 / 530
236 / 530

Actual Problems in Machine Building. 2016. N 3
Technological Equipment, Machining
Attachments and Instruments
____________________________________________________________________
236
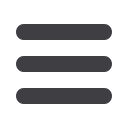
Рис. 2.
Структурная схема динамической модели электромеханической системы
колебательного движения.
Питание модели осуществляется от однофазного источника напряжения промышлен-
ной частоты 50 Гц по однополупериодной схеме выпрямления, реализованной с помощью
блока
Electrial subsystem
. Учет нелинейных свойств модели реализован в программе с помо-
щью подсистемы
Magnetic subsystem
. Задание функции двух аргументов и интерполяция ста-
тических параметров модели
ψ ,
i x
и
эм
,
f
i x
в процессе счета осуществляется с помощью
блока двумерной таблицы. Учет механических характеристик модели, в соответствии с урав-
нением (2), реализован с помощью подсистемы
Mechanical subsystem
(рис. 2).
Результаты анализа динамической модели
Анализ рабочих режимов методами и средствами структурного моделирования вы-
полнен при следующих параметрах динамической модели: напряжение источника
175В
m
U
; масса подвижных частей
0, 2 кг
m
; сопротивление катушки
8, 2Ом
r
; коэф-
фициент жесткости упругого элемента (пружины)
12500Н м
k
; коэффициент вязкого тре-
ния упругих связей
0
0...15 Нс м
b
; сила сухого трения
тр
0...15Н
f
; начальная глубина
внедрения якоря
3
0
7 10 м
x
. Линейные размеры магнитопровода
3
1
45 10 м
l
;
3
2
95 10 м
l
;
3
1
46 10 м
h
;
3
2
96 10 м
h
; толщина пакета набранного из листов элек-
тротехнической стали
3
30 10 м
L
. Частота собственных колебаний механической системы
1
0
ω 250c
.
На рис. 3. показаны изменения величин амплитуды
m
A
и максимальной скорости
max
v
колебаний якоря электропривода в зависимости от величины коэффициента вязкого
трения упругих связей
0
b
и силы трения скольжения
тр
f
, возникающих в механической ко-
лебательной системе электропривода с электромагнитным возбуждением. Из представлен-