












 230 / 530
230 / 530

Actual Problems in Machine Building. 2016. N 3
Technological Equipment, Machining
Attachments and Instruments
____________________________________________________________________
230
рата, а панели МУ БС подвешиваются на тросы за центры масс конструкции в 12-ти точках
вывески, каждая из которых имеет отдельный привод вертикального, продольного и гори-
зонтального перемещения. С каждым приводом осуществляется обратная связь с помощью
датчика силы вывески и блока определения рассогласования координат. В ходе раскрытия
датчик силы определяет натяжение троса и посылает сигнал в контроллер, установленный в
щите автоматики. В случае изменения натяжения троса контроллер управляет серводвигате-
лем для компенсации изменения натяжения. При раскрытии конструкции отклонение троса
от вертикали фиксируется блоком определения рассогласования координат (специальными
оптическими датчиками), которые, в свою очередь, передают сигнал на серводвигатели и от-
клонение компенсируется.
Привод вертикального перемещения точки вывески обезвешивания осуществляет по-
перечное перемещение по рельсовым профильным направляющим продольной каретки, ко-
торая совершает движение вдоль основания, за счет приводов продольного и поперечного
перемещения, состоящих из серводвигателей, редукторов и зубчатых шкивов, обкатываю-
щих зубчатые ремни, натянутые по направлению движения. Продольный и поперечный ход
ограничивается концевыми выключателями.
Конструкция привода такова, что при отказе датчиков, ограничивающих вертикаль-
ный ход, исключается аварийная ситуация, приводящая к поломке МУ БС и нарушению ра-
ботоспособности системы.
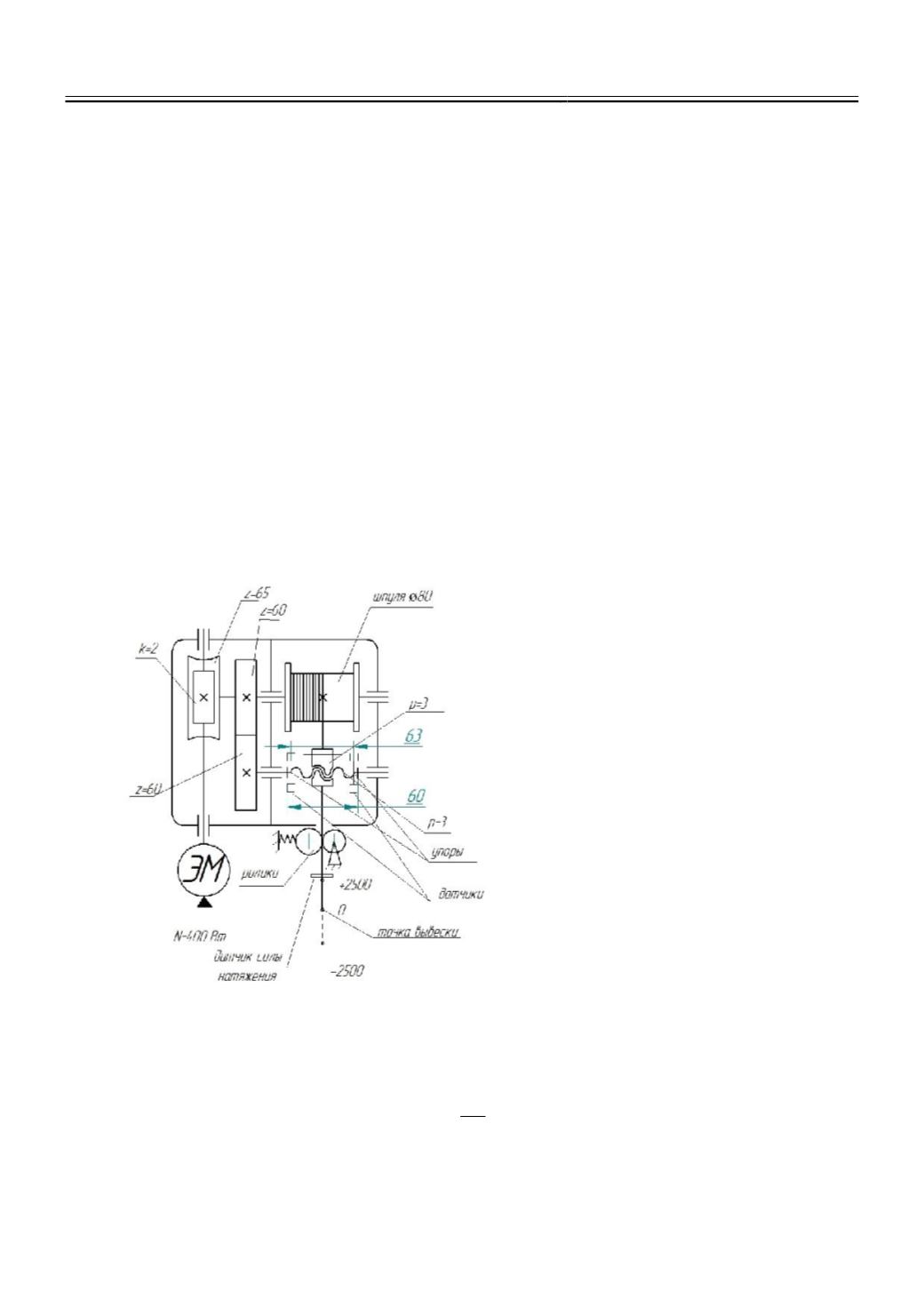
На рисунке 1 представлена кинематическая схема разработанного изделия. Трос с
точкой вывески укладывается в один слой
гайкой-укладчиком на шпулю диаметром
80 мм. В данной конструкции использу-
ется передача «винт-гайка», шаг резьбы
винта равен диаметру троса (3 мм), по-
ступательным движением гайки-
укладчика согласованы с оборотами вала
со шпулей посредством цилиндрической
зубчатой передачи 60-60. Таким образом,
при перемещении точки вывески на 2500
мм от нулевой точки, шпуля совершит 10
оборотов, гайка-укладчик пройдет путь в
30 мм, перекроет луч датчика, произойдет
остановка двигателя. В случае отказа дат-
чиков гайка пройдет путь в 31,5 мм и до-
стигнет механического упора. Как только
момент на двигателе возрастет - произой-
дет его останов. Во избежание перемеще-
ния объекта обезвешивания при воздей-
ствии каких-либо внешних нагрузок
установки двигатель и шпуля согласова-
ны посредством червячной передачи, об-
ладающей свойством самоторможения.
Выбор диаметра и ширины шпули
[7 - 12]:
D
L n
(1)
где n – количество оборотов шпули, L – вертикальный ход точки вывески, D – диаметр шпу-
ли.
Рис. 1.
Кинематическая схема привода
системы вертикального перемещения точки
вывески обезвешивания