












 221 / 530
221 / 530

Актуальные проблемы в машиностроении. 2016. №3
Технологическое оборудование,
оснастка и инструменты
____________________________________________________________________
221
Гидравлический шаговый привод составляет новый класс объемных гидроприводов,
функциональные особенности которых состоят в том, что они способны устойчиво отраба-
тывать релейные и импульсные сигналы с высокой точностью и большим усилием при зна-
чительной нагрузке [8-9].
Структурно шаговый гидропривод представляет собой гидромеханическую систему,
состоящую из трех функционально и конструктивно завершенных агрегатов (модулей): ис-
точника рабочей жидкости (насосная установка), управляющего (коммутирующего) устрой-
ства – генератора гидравлических импульсов - и исполнительного силового шагового гидро-
двигателя.
Передача «гидравлический вал» выполнена в виде отдельных функционально и кон-
структивно завершенных агрегатов (модулей): источника рабочей жидкости, управляющего
(коммутирующего) устройства, которое формирует управляющие импульсы и распределяет
их по рабочим камерам исполнительного силового шагового гидродвигателя [10].
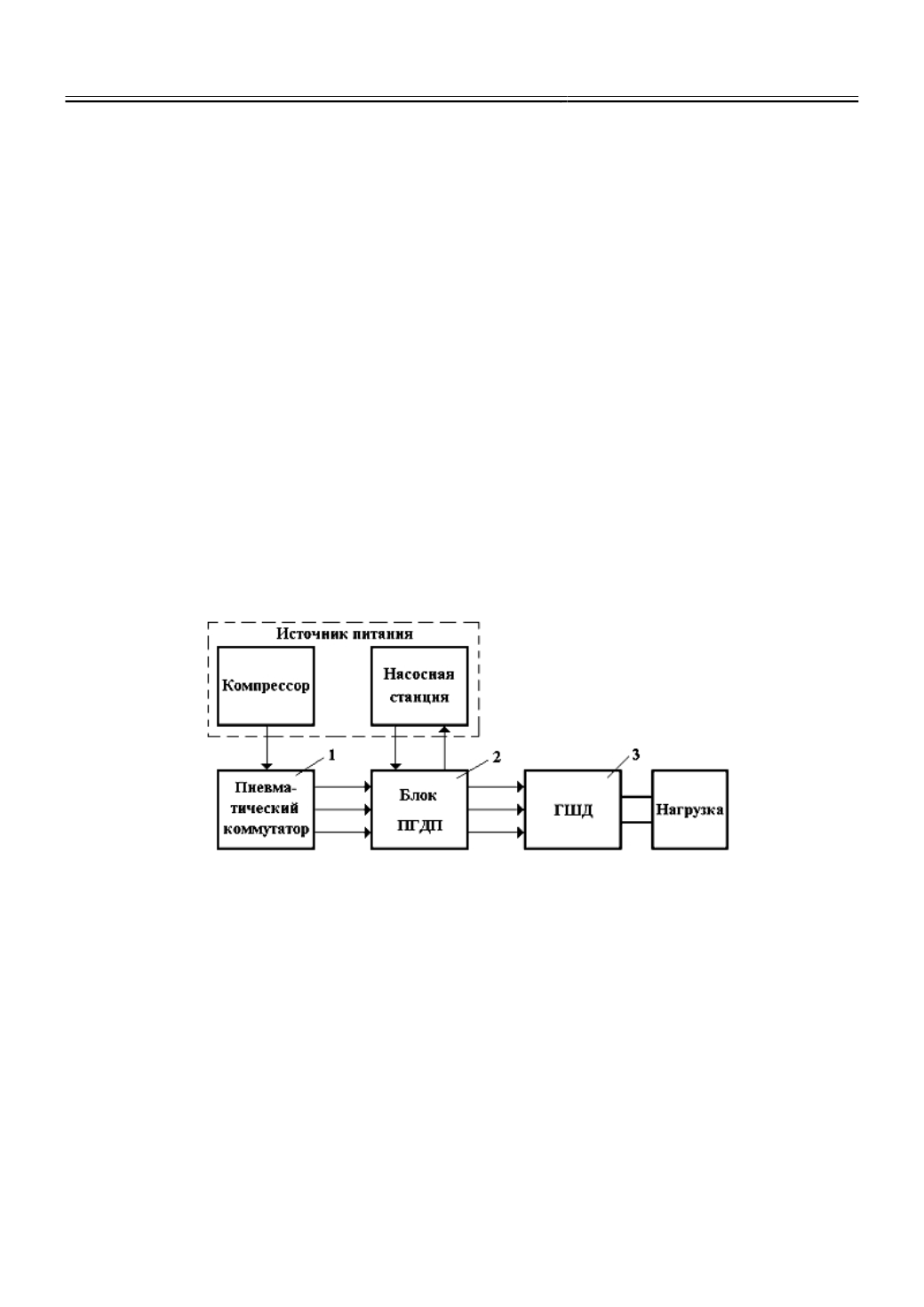
Конструктивно шаговый гидропривод состоит из трех частей: управляющего устрой-
ства (пневматический коммутатор) –
1
; блока пневмогидравлических дискретных преобразо-
вателей – усилителей –
2
и силового исполнительного шагового гидродвигателя –
3
(рис. 1).
В качестве исполнительных силовых органов в гидравлических связях используются
гидравлические шаговые двигатели, преобразующие последовательность гидравлических
импульсов управления в дискретные угловые или линейные перемещения, при этом скорость
вращения и суммарный угол поворота выходного вала шагового гидродвигателя пропорцио-
нальны соответственно частоте и количеству поданных управляющих импульсов; при отсут-
ствии входных сигналов звено удерживается в зафиксированном положении.
Рис. 1.
Структурная схема гидравлического шагового привода
Поскольку для воспроизведения образующей линии по методу обката между переме-
щениями рабочих органов - заготовки и инструмента – необходимо осуществить требуемую
функциональную зависимость, а для получения формообразующего движения необходимо
обеспечить жесткую кинематическую связь между заготовкой и инструментом, то в этом
случае из всех видов шаговых гидродвигателей наиболее приемлемыми для применения во
внутренних кинематических цепях, выполненных в виде гидравлических связей на основе
шагового гидропривода, являются двигатели с механической редукцией шага.
Используя особенности частотного регулирования скорости исполнительных силовых
шаговых гидродвигателей и высокие компоновочные качества шагового гидропривода,
представляется возможным применять гидравлические связи на основе шагового гидропри-
вода для построения внутренних (формообразующих) цепей станков со сложными движени-
ями формообразования.