














 258 / 460
258 / 460

Actual Problems in Machine Building. 2015. N 2
Technological Equipment, Machining
Attachments and Instruments
____________________________________________________________________
258
В результате приведения пространственная система дисбалансов
1
D
,
2
D
,...,
30
D
(рис. 1) получилась замененной двумя плоскими системами (рис. 2). Сложив дисбалансы,
расположенные в каждой из плоскостей, получили:
iA
A
D D
,
(4)
iB
B
D D
.
(5)
Причем
D
A
= D
B
=
47516,9 мм·г.
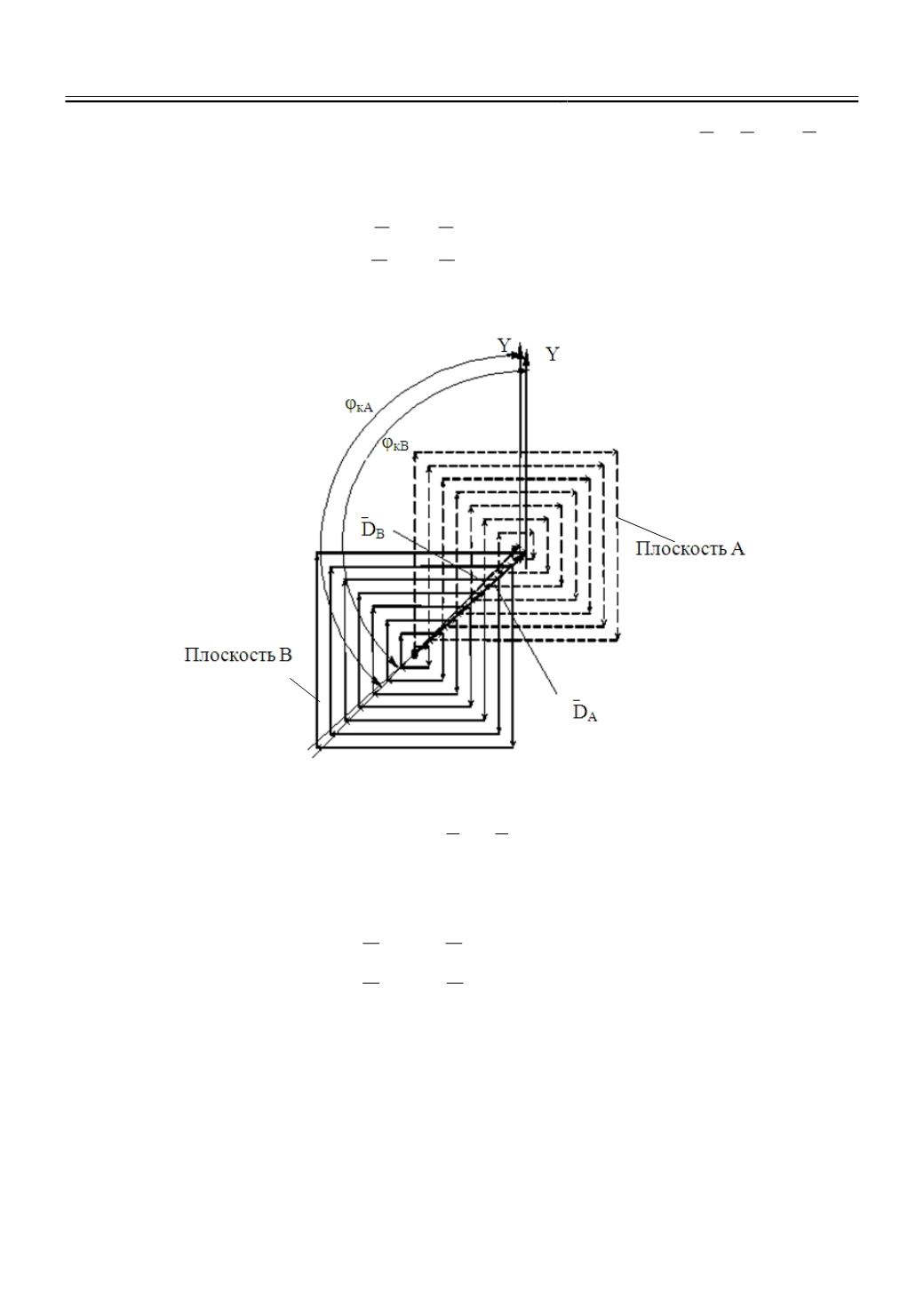
Рис. 2.
План дисбалансов (при номинальных размерах элементов месильного вала)
Таким образом, неуравновешенность заданного ротора можно представить двумя
скрещивающимися векторами дисбалансов
А
D
и
В
D
, расположенными в плоскостях приве-
дения А и В (рис. 2). Тогда они будут одновременно и плоскостями коррекции.
Условиями полной балансировки будут
.
,
BD кBD
AD кАD
(6)
(7)
Эти векторы показаны на рисунке 1 (б), их угловые координаты φ
кA
= 137° и φ
кB
= 134°
были взяты с планов дисбалансов (рис. 2).
С помощью трехмерного твердотельного моделирования были построены объемные
модели рабочего вала смесителя непрерывного действия с месильными лопатками, выпол-
ненными с различной точностью в соответствии с квалитетами с IT6 по IT18, а затем полу-
чены значения дисбалансов с учетом точности изготовления месильных лопаток, которые
приведены в таблице.