












 110 / 457
110 / 457

Механики XXI веку. №15 2016 г.
110
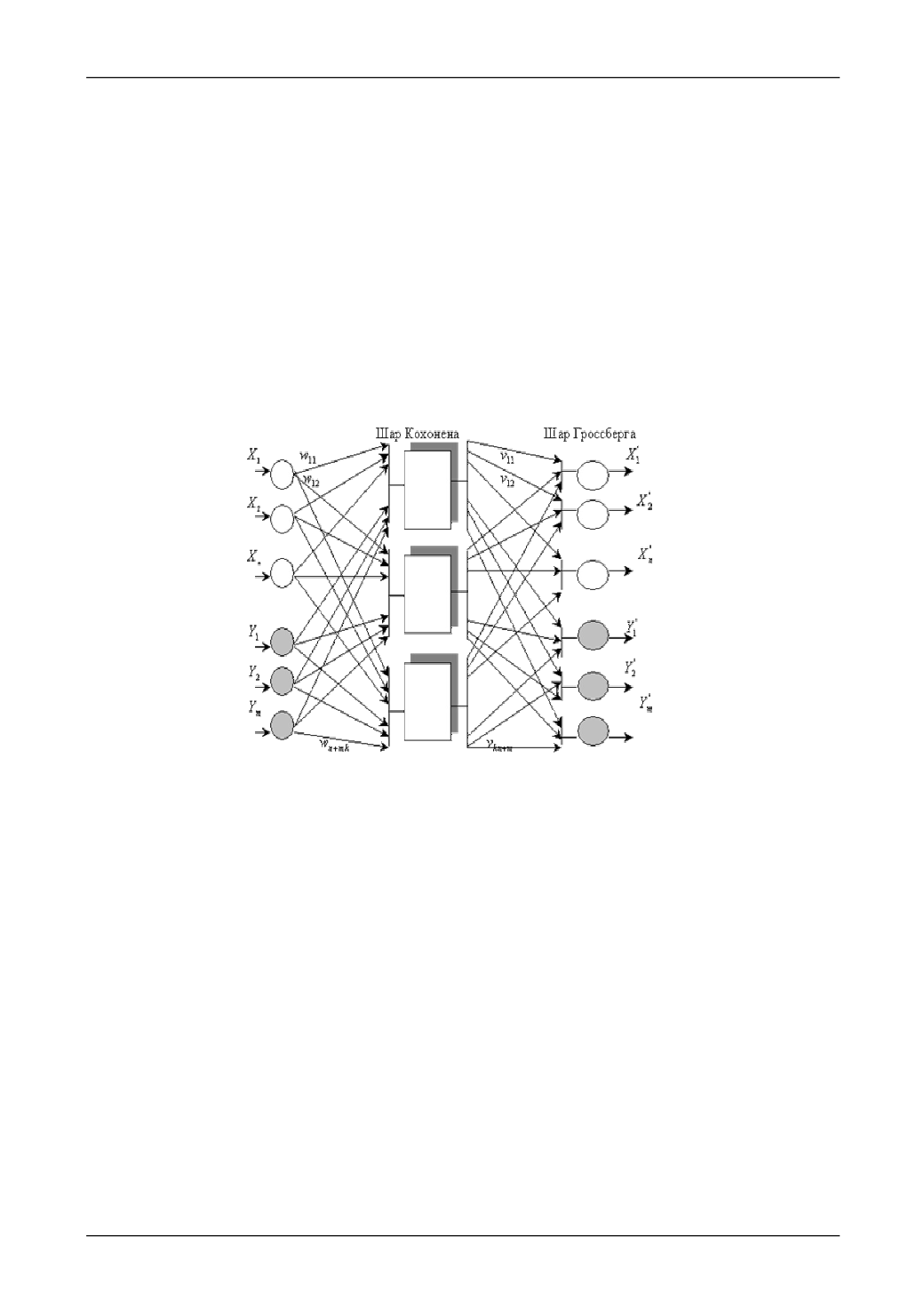
слоя Гроссберга по сигналу нейрона-победителя в слое Кохонена воспроизводит на выходах сети со-
ответствующий образ.
Подобно другим сетям сеть ВР работает в двух режимах: обучения и использования. В первом
случае на входы подается и вектор Х и вектор У, корректируются весовые коэффициенты; во втором
режиме на вход уже обученной сети подаются У или Х, а с выхода снимаются и Х и У.
Для предварительного прогнозирования рекомендуется использовать сеть встречного распро-
странения ВР. По сравнению с другими сетями сеть ВР обучается значительно быстрее, но точность
результата меньше.
Исследования последних лет [5, 6, 7, 8] показали, что параллельная природа нейросетей обес-
печивает вычисления с высокими скоростями. Сети, содержащие нелинейные компоненты, могут
быть использованы для аппроксимации нелинейных отображений с любой желаемой степенью точ-
ности. Параметры НС могут подстраиваться в реальном времени с учетом входных/выходных дан-
ных, они могут использоваться в качестве адаптивных, обучаемых или самообучающихся систем,
обеспечивающих высокое качество функционирования систем автоматического управления в усло-
виях существенной неопределенности (недостаточности) информации об объекте управления и
внешней среде.
Рис. 1. Сеть встречного распространения
Выводы.
Включение НС в систему управления технологическим процессом металлообработ-
ки позволит придать ей принципиально новые свойства; система приобретёт способность понимать,
рассуждать, изучать процессы, возмущения и условия функционирования, накапливать полученные
ею знания и целенаправленно использовать их для улучшения своих качественных характеристик.
Литература:
1.
Безъязычный В.Ф. Расчет режимов резания. Учебное пособие //В.Ф. Безъязычный, И.Н. Аверья-
нов, А.В. Кордюков – Рыбинск: РГАТА, 2009. – 185 с.
2.
Бржозовский Б.М., Бровкова М.Б. К вопросу оценивания качества и определения оптимальной на-
стройки технологического объекта в реальном времени // Исследования станков и инструментов для обработки
сложных и точных поверхностей: Межвуз. науч. сб. - Саратов: СГТУ, 2003. - С. 131-137.
3.
Бржозовский Б.М., Бровкова М.Б., Мартынов В.В. Определение параметров качества изделий при
механообработке в реальном времени на основе нейросетевых алгоритмов // Нелинейная динамика и приклад-
ная синергетика: Материалы Междунар. конф. - Комсомольск-на-Амуре, 2003. - С.62-65.
4.
Барский А.Б. Нейронные сети: распознавание, управление, принятие решений. – М.: Финансы и
статистика, 2004. –с.179
5.
Ясницкий Л. Н. Введение в искусственный интеллект : учеб. пособие для студ. высш. учеб. заве-
дений Л. Н. Ясницкий. -- 2-е изд., испр. -- М.: Издательский центр «Академия», 2008. – с.176 с.
6.
Kohonen T. 1984. Self-organization and associative memory. Series in Information Sciences, vol. 8.
Berlin: Springer Verlag. 82с.