














 91 / 146
91 / 146

Актуальные проблемы в машиностроении
. Том 4. № 4. 2017
Технологическое оборудование,
оснастка и инструменты
____________________________________________________________________
91
левой точки необходимо разрядить емкость C
r
с помощью кнопки сброса. Имеющийся дрейф
компенсируется программно уже на этапе обработки сигнала по данным полученным с ре-
ференсного измерения без приложения сил.
Результаты и обсуждение
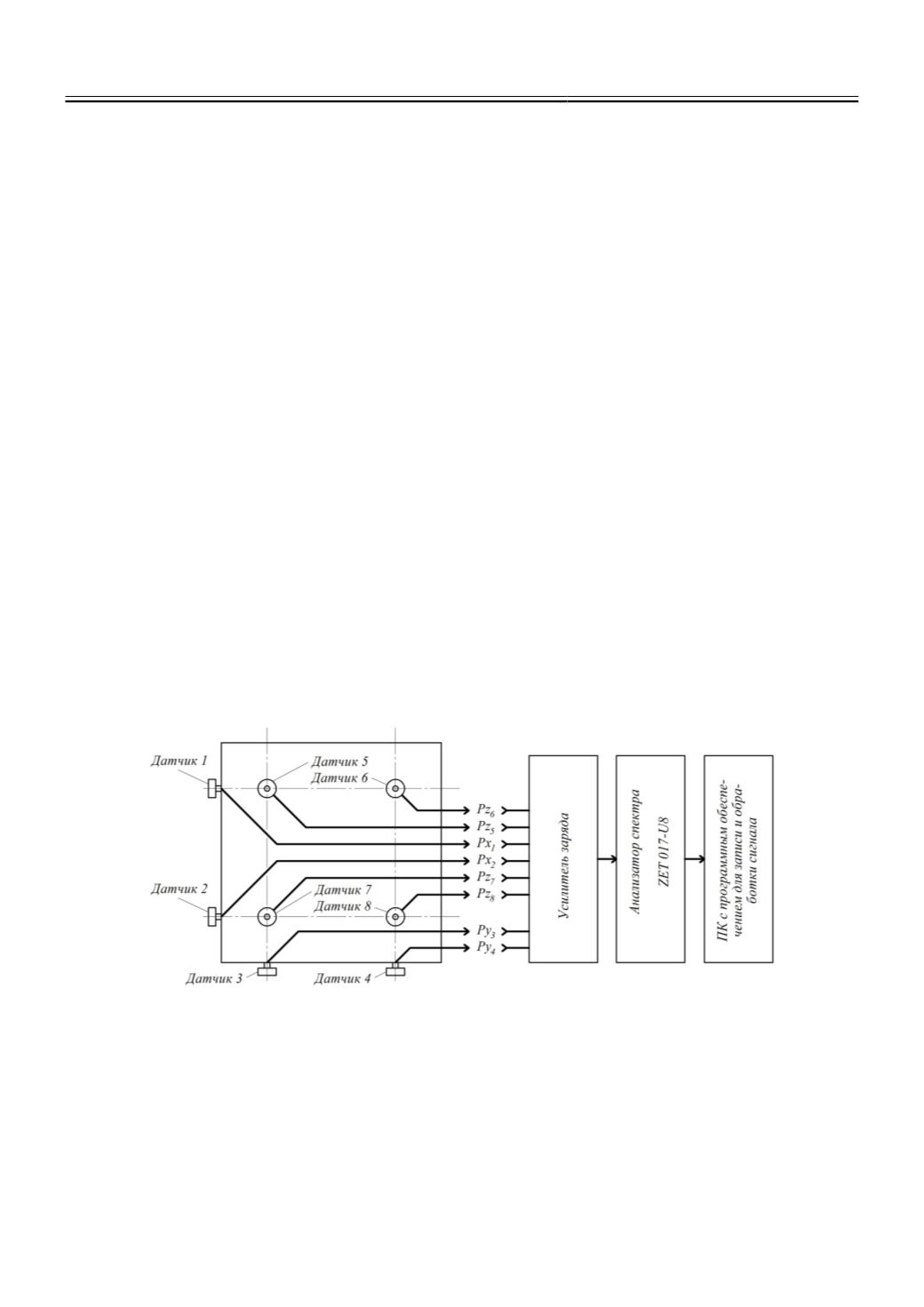
На основании вышеизложенного была принята схема динамометра (рис. 2) с приме-
нением преднагружения пьезоэлектрических датчиков изменения силы. Конструкция корпу-
са динамометра предполагает, что после базирования устройства на столе станка оси датчи-
ков окажутся параллельны координатным осям станка. В схеме используется 8 датчиков: оси
двух из них вдоль параллельны оси X станка, оси двух – оси Y, оси оставшихся четырёх –
оси Z.
В качестве датчиков изменения силы использованы датчик силы AC20. Осевая чув-
ствительность датчиков варьируется в диапазоне от 1,69...1,98 пКл/Н (в среднем
14,92 пКл/Н), электрическая ёмкость – в диапазоне 30,6...35,6 пФ (в среднем 32,3 пФ).
Диапазон измеряемых усилий датчиков лежит в интервале −1000...+5000 Н. Однако
силы резания при обработке осевым инструментом могут быть направлены каким угодно об-
разом в зависимости от направления подачи и направления вращения инструмента. Таким
образом, необходимо устанавливать датчики на одной оси, зеркально друг другу. Однако это
ведёт к увеличению числа датчиков вдвое по сравнению со случаем использования датчиков
с симметричным диапазоном измерений. Чтобы сократить количество используемых датчи-
ков, было принято решение преднагрузить каждый из них в осевом направлении усилием
2000 Н. За счёт этого удалось обеспечить симметричный диапазон измерений в интервале
−3000...+3000 Н. Недостатком данного решения стало сокращение абсолютной величины
предельной измеряемой динамометром нагрузки, однако ширина полученного диапазона из-
мерений вполне достаточна для исследовательских задач.
Рис. 2.
Схема динамометра для измерения сил резания
Как известно из теоретической механики [8 и многие другие], значение главного век-
тора от выбора центра приведения C не зависит. Значение же главного момента при измене-
нии положения центра C может в общем случае изменяется вследствие соответствующего
изменения значений моментов отдельных сил. Момент сил резания M
z
по сути является
главным моментом системы сил P
x1
, P
x2
, P
y3
и P
y4
(рис. 3).
Динамометры производства Kistler позволяют определять момент M
z
относительно
только центральной точки динамометра. Математическое обеспечение предлагаемого дина-